


16 september 2024
Bellenscherm in Amsterdam blijft: vangt 1 ton plastic afval per jaar
Er wordt onderzocht waar in de stad nog een extra bellenscherm kan komen.
Lees meerWe onderzoeken of we de grachten kunnen schoonhouden met een zelfvarende boot: de Nautonomous. De boot vist drijvend afval op.
Het opruimen van drijvend vuil doen we elke werkdag, 52 weken per jaar. Dat is zwaar werk, vooral bij slecht weer. De Nautonomous komt dan goed van pas.
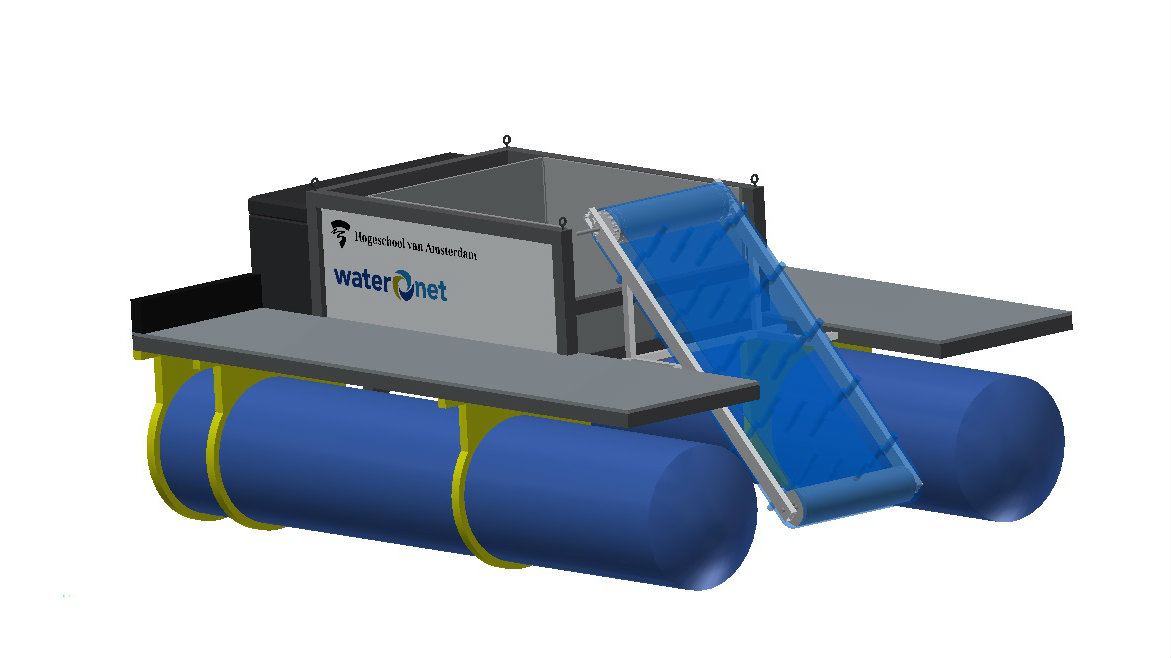
De Nautonomous heeft een elektrische motor. Die laat een lopende band bewegen, aan de voorkant van de boot. De band vist dan het drijvende vuil uit het water. Daarna komt het terecht in een verzamelbak.
De eerste versie van de software van de boot is geschreven door Daan Zeeuwe, student van de Hogeschool van Amsterdam. Hij studeerde erop af, met een 10 voor zijn scriptie.
De computer in de Nautonomous is een Jetson TX1. Die is net zo krachtig als een laptop, maar gebruikt veel minder energie. Dat moet ook wel. De Nautonomous heeft zijn 2 accu’s hard nodig voor het varen.
Voor het sturen is een speciaal ROS (Robot Operating System) gemaakt. Een paar andere kenmerken:
In het onderzoek werken wij samen met het Amsterdam Institute for Advanced Metropolitan Solutions (AMS) en Massachusetts Institute of Technology (MIT).
Deze 2 filmpjes laten zien hoe de eerste proefvaarten van de Nautonomous gingen. Die waren in 2015.
U kunt deze video niet bekijken, omdat tracking cookies uit staan. Lees meer op de privacy- en cookiespagina.
U kunt deze video niet bekijken, omdat tracking cookies uit staan. Lees meer op de privacy- en cookiespagina.
Er wordt onderzocht waar in de stad nog een extra bellenscherm kan komen.
Lees meerAls beheerder van aquathermiebronnen heeft Waternet de omgevingswarmtekaart opgezet.
Lees meer
Waternet is bezig met een pilot om met drones inspecties uit te voeren van circa 14.000 zonnepanelen in Nieuwegein.
Lees meer
Met drones kunnen we onze assets, gevels en daken inspecteren en controleren op lekkages. En het controleren van zonnepanelen op defecten.
Lees meer